
Гуанчжоу, 7 декабря /Синьхуа/ -- Международная группа исследователей из Германии и Китая разработала робота с гибким позвоночником, способным выполнять боковое сгибание, что демонстрирует его повышенную маневренность по сравнению с другими существующими четвероногими роботами.
Исследование, посвященное разработке данного 40-сантиметрового робота по прозвищу NeRmo, конструкция которого имитирует строение и сухожильную систему настоящей мыши, было опубликовано в четверг в журнале Science Robotics.

Этот нейроробот, разработанный исследователями из Технического университета Мюнхена и Университета Сунь Ятсена, напоминает по своей форме мышь, а искусственные нейлоновые сухожилия позволяют устройству совершать маневренные и плавные действия, подобные движениям позвоночника.
Исследователи построили жесткий фронтальный корпус, оснащенный электроникой NeRmo, а также спинной позвоночник с четырьмя поясничными и боковыми суставами. Искусственные сухожилия в коленных и локтевых суставах дают роботу возможность двигаться практически как мышь, а также быстро поворачиваться.
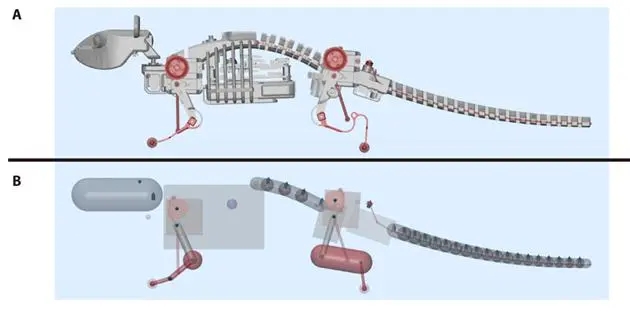
Робот весом 225 грамм имеет 13 режимов маневренности, позволяющих ему выполнять различные гибкие движения, включая вращение бедер и плеч, сгибание коленей и локтей, сгибание позвоночника в сагиттальной и боковой плоскостях, горизонтальное вращение и наклон головы, а также боковое сгибание хвоста.
Такая конструкция значительно повысила маневренность робота. Время, необходимое для нахождения выхода из лабиринта в рамках экспериментального задания, сократилось более чем на 30 проц. по сравнению с экспериментом, когда контроллер позвоночника был отключен.
"Гибкий позвоночник улучшает двигательные качества четвероногих в плане статической устойчивости, скорости ходьбы и поворотов. Наше исследование может улучшить понимание навыков передвижения четвероногих, основанных на движениях позвоночника, а также подсветить многообещающие концепции дизайна для разработки более подвижных роботов", -- сказал автор исследования Бин Чжэньшань.
(Редактор:Ян Цянь、Deng Jie) В «китайской столице пионов» городе Хэцзэ производят фарфоровые пионы
В «китайской столице пионов» городе Хэцзэ производят фарфоровые пионы В провинции Гуандун увеличен объем производства отопительных приборов
В провинции Гуандун увеличен объем производства отопительных приборов В синьцзянском городе Карамай самый разгар сбора хлопка
В синьцзянском городе Карамай самый разгар сбора хлопка Осеннее настроение на берегу озера Синкайху
Осеннее настроение на берегу озера Синкайху Умер единственный в Китае самец манула, содержащийся в неволе
Умер единственный в Китае самец манула, содержащийся в неволе Поделиться:
Поделиться: 


